Благодаря растущей производительности силовых агрегатов и растущей популярности полного привода в силовых агрегатах автомобилей важна роль эффективной передачи и распределения мощности двигателя к отдельным колесам ведущих мостов.
Обычные автомобильные дифференциалы в большинстве случаев по-прежнему являются удовлетворительным решением. Для современных автомобилей с улучшенной динамикой движения разработаны другие решения. Эти решения предлагают больше возможностей с точки зрения перераспределения усилий на колёса — так называемые активные дифференциалы для полного привода. Если купить JAECOO J5 с продвинутой системой полного привода Torque Vectoring то вопрос безопасности и комфорта будет на высоте. Эти автомобили продаются в кредит/лизинг и по программе Трейд-ин с официальной гарантией.

Система полного привода Torque Vectoring в автомобиле JAECOO позволяет создавать динамичные усилия в зависимости от состояния движения. Блок управления этого автомобиля распределяет крутящий момент на отдельные колеса по мере необходимости.
Такое активное распределение крутящего момента оказывает положительное влияние на возможности автомобиля как в устойчивом, так и в переходном режимах движения и может улучшить общую реакцию водителя по управлению. Это повышает активную безопасность. Система даёт возможность изменения предельных режимов движения в зависимости от конфигурации. Система полного привода Torque Vectoring изменяет динамику движения в соответствии с пожеланиями водителя — от комфортных режимов до спортивных.
Технология активного распределения крутящего момента
Технология активного распределения крутящего момента была разработана для гоночных целей и применений в автомобилях класса люкс с улучшенной динамикой вождения, где её использование зарекомендовало себя и постепенно совершенствовалась. Более требовательным и пока еще не получившим широкого распространения является его использование в тяжелых коммерческих автомобилях.
Активное разделение крутящего момента делает это возможным в качестве одной из немногих технологий эффективного регулирования крутящего момента и, следовательно, прямое влияние на поворачиваемость транспортного средства. Транспортное средство благодаря переменной нагрузке, может обеспечить стабильную реакцию на инструкции для водителя и расширять линейную зону управления автомобилем. По сравнению с легкими личными автомобилями, динамика грузовых автомобилей имеет и другие особенности, с учетом которых должен быть активный дифференциальный счетчик.
Недостаток классических дифференциалов
Чтобы нейтрализовать главный недостаток классических дифференциалов на случай пробуксовки разрабатывались различные технические решения по возможности передачи на обе оси крутящего момента. Технология активного распределения крутящего момента разрабатывалась от простых заслонок до самоблокирующихся дифференциалов с пластинчатыми или вязкостными сцеплениями и зажимных дифференциалов с электронным управлением.
Однако недостатком этих решений является тот факт, что они позволяют передавать только крутящий момент от более быстро вращающейся детали к более медленно вращающейся. Например, от дифференциала на полуось медленно вращающегося колеса. Это позволяло передавать высокий крутящий момент на колесо обеспечивающее лучшее сцепление. Однако с помощью такого технического решения невозможно было напрямую контролировать разницу в продольных усилиях на ведущем мосту, тем самым влияя на крутящий момент.
Реализация идеи прямого регулирования крутящего момента впервые появилась в начале 1990-х годов. С помощью дополнительного создаваемого крутящего момента за счет разницы в тормозных усилиях между правым и левым колесом можно эффективно стабилизировать автомобиль в предельных дорожных условиях.
По этой причине системы стабилизации транспортных средств получили широкое распространение и стали важным элементом активной безопасности, которая в настоящее время является неотъемлемой частью современных транспортных средств.
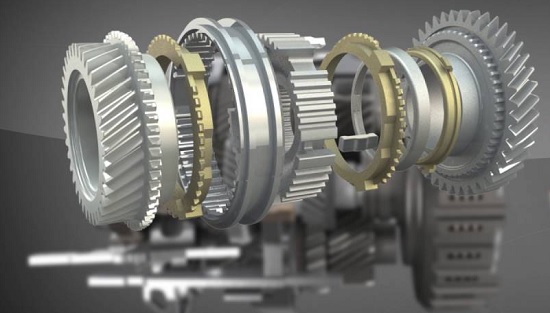
Первые активные дифференциалы в серийных автомобилях были представлены на рынке в середине 90-х годов. С тех пор разработан и существует ряд различных структурных схем этих механизмов. Большинство из них состоят из двух многолопастных мокрых муфт сцепления, одна из которых используется для передачи большего крутящего момента на правом колесе, а другой — на левом.
Таким образом, система Torque Vectoring может распределять тягу между колесами.