Исследования советского нейрофизиолога Николая Бернштейна (1896-1966) в области биомеханики человека предложили новые подходы, основанные на системных моделях, в которых мускульные движения самоорганизуются под свои функции с непрерывным обменом между восприятием и действием, а также между мозгом и органами. Что касается вопроса о координации движений, то на этот подход оказали глубокое влияние.
Николай Бернштейн создатель нового направления в науке, которое он назвал «физиологией активности».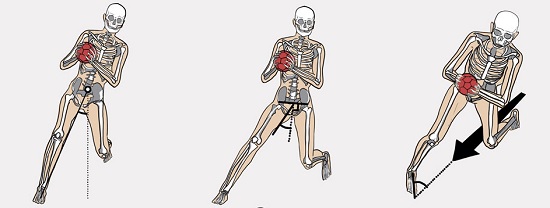
Учитывая невозможность предвидеть все события, которые могут произойти во время выполнения движения Бернштейн выдвинул оригинальную идею о том, что главная роль мозга заключается в упрощении управления движением.
Действительно, в человеческом теле насчитывается около 792 мышц, которые в совокупности вызывают энергетические изменения в скелетных суставах.
Определение положения человеческого тела зависит от шарнирных соединений, которые включают около 100 механических степеней свободы, характеризуемых двумя состояниями: положением и скоростью для получения пространства состояний в виде 200 измерений.
Основные определения Николая Бернштейна
Бернштейн (1967) формулирует вопрос о многих аспектах свободы контроля. Он дал определение координации, которое глубоко повлияло на понимание управления движением: координация движения – это процесс овладения избыточными степенями свободы движения.

Бернштейн предположил, что мозг способен ”функционально замораживать степени свободы”. В качестве аналогии: независимо управлять четырьмя колесами автомобиля сложно. Тем не менее, благодаря функциональному ограничению степеней свободы (двум задним колесам разрешено вращаться только вокруг одной общей горизонтальной оси, а двум передним колесам также разрешено вращаться параллельно вокруг продольной оси, управляемой рулевым колесом), автомобиль становится намного проще для контроля. Бернштейн также проделал большую работу с моторным обучением, создавая модели для этапов обучения.
Нейрофизиолог Николай Бернштейн вывел свойства по проблеме координации:
- кинематические детали любого скоординированного состояния вносятся постепенно многими подсистемами, работающими вместе;
- можно использовать разные степени свободы одним и тем же способом для достижения одной и той же цели и одни и те же степени свободы разными способами для достижения разных целей;
- подсистемы, составляющие биологическую систему передвижения, относительно автономны;
- подсистемы биологической системы движения имеют стандартное поведение или генерируют стандартные функции;
- группа мышц может стать функционально связанной, чтобы вести себя как единое целое, специфичное для конкретной задачи;
- движение может быть достигнуто путем настройки мышечной связи так, чтобы она вела себя как пружина чье положение равновесия является предполагаемым положением конечности;
- используя инвариантные задачи, простое решение может появиться из задач высокой размерности;
- формирующие и управляющие роли должны быть организованы таким образом, чтобы обеспечить к исходу, что координация необходима для восприятия и действия.
Работы Бернштейна были удивительно проницательны и использовались в качестве поддержки во многих областях науки о движении человека. Его работы позволяют понять, как люди планируют и контролируют движение, несмотря на большое количество суставов, которые обеспечивают человеческую опорно-двигательную систему множеством кинематических степеней свободы. Рассматривая главную роль мозга в управлении движениями, Николай Бернштейн открыл огромное окно для различных концепций базовой модели.
Динамический подход к человеческому движению: нелинейный подход
Бернштейн в инновационном подходе пытается объяснить, как человек планирует и контролирует ритмические движения, которых в человеческом поведении множество. Основываясь на подходе Бернштейна, их можно рассматривать как самоиндуцированный генератор. Они состоят из четырех компонентов:
- Колебательный компонент с упругими свойствами (жесткость системы), который позволяет вернуться к равновесию, и инерционное свойство, которое допускает превышение.
- Источник энергии, который компенсирует потерю энергии.
- Орган который пропускает энергию к компоненту в нужных количествах и в нужное время.
- Компонент обратной связи, который управляет, используя свойства самой колебательной системы.
Этот методологический подход позволяет сравнивать частоту движения конечностей у разных животных во время ходьбы или бега. Удивительно заметить, что совокупность данных в литературе о четвероногих животных показывает прямую линию при построении графика относительно длины или массы конечностей, несмотря на разницу в размерах тела.
Еще один шаг в понимании человеческого движения был сделан в 1980-х годах с предположением, что движение это простейшая форма самоорганизации. Основной принцип этого подхода состоит в том, чтобы рассматривать координацию движений человека как идентификацию основных переменных.
Таким образом, движение рассматривается как нелинейная динамическая система, в которой происходят переключение из одного координационного состояния в другое под влиянием порядка. Понимание координации движений, основано на самоорганизации двигательной системы, подчеркивая взаимность животного и его окружающей среды.